HTS- INS-3 Inertial Navigation System is a GPS-aided INS, which consists of a MEMS inertial measurement unit, a satellite positioning receiver, etc. It uses high performance MEMS device temperature error compensation, system-level self-calibration and error compensation, dual-antenna heading output delay compensation and heading angle fusion, INS/GNSS combined navigation tightly coupled filtering and sequential processing, IMU body non-orthogonal online compensation and other technologies to measure and output high-precision carrier position, speed, attitude angle and other navigation parameter information in real time, and can be connected to an external vehicle speedometer.
HTS- INS-3 MEMS Inertial Navigation System (INS) based GPS receivers combine high performance MEMS inertial sensors with advanced processing techniques to provide accurate position, orientation and velocity data for Unmanned Aerial Vehicle (UAV) and unmanned system applications. INS units provide reliable performance even when GPS signals are limited or unavailable.
Features:
• High-precision inertial navigation system
• Stable positioning during GNSS outages
• Low noise MEMS Gyroscopes
• High performance MEMS accelerometers
Performance Characteristics
Speci | Unit | Model | |||||
HTS-INS-3A | HTS-INS-3B | HTS-INS-3C | HTS-INS-3D | ||||
Heading accuracy (RMS) | Heading angle | 2m Baseline | ° | 0.1 | |||
Pitch angle / Roll angle | Airborne, Shipborne | ° | 0.3 | 0.3 | 0.2 | 0.2 | |
In-car | ° | 0.25 | 0.2 | 0.15 | 0.15 | ||
Position accuracy (RMS) | Level | _____ | m | 1.5 (single point) (RTK: 0.8cm+1ppm) | |||
Height | _____ | m | 3 (single point) (RTK: 1.5cm+1ppm) | ||||
Speed accuracy (RMS) | m/s | 0.2 | |||||
Pure inertial position error (RMS, wheel speed meter assisted, D is mileage) | ‰ D | 1 | 8 | 5 | 3 | ||
Gyro | Range | °/s | ±400 | ||||
Bias stability (10s smooth, 1σ, room temperature) | °/h | 10 | 3 | 2 | 0.4 | ||
Full temperature zero bias change (10s smoothing, RMS, variable temperature) | °/h | 60 | 20 | 10 | 2 | ||
Bias repeatability | °/h | 20 | 3 | 1 | 0.3 | ||
Random walk | °/√h | 0.5 | 0.15 | 0.05 | 0.02 | ||
Cross coupling | % | 0.2 | 0.1 | ||||
Accelerometer | Range | g | ±10 | ||||
Bias stability (10s smooth, 1σ, room temperature) | mg | 0.05 | |||||
Full temperature zero bias change (10s smoothing, RMS, variable temperature) | mg | 2 | |||||
Bias repeatability | mg | 0.2 | |||||
Cross coupling | % | 0.1 | |||||
Satellite positioning | Frequency | _____ | BDS: B1IB2IB3IB1C B2a GPS:LIC/A LIC L2P(W) L2CL5 GLONASS:L1L2 Galileo:E1 E5a E5b QZSS: L1 L2 L5 | ||||
Cold start | s | 20 | |||||
Data update rate | Hz | 100 (customizable) | |||||
Votage | V | 9~36 | |||||
Power consumption | W | 8 | |||||
Operating temperature | ℃ | -45~+80 | |||||
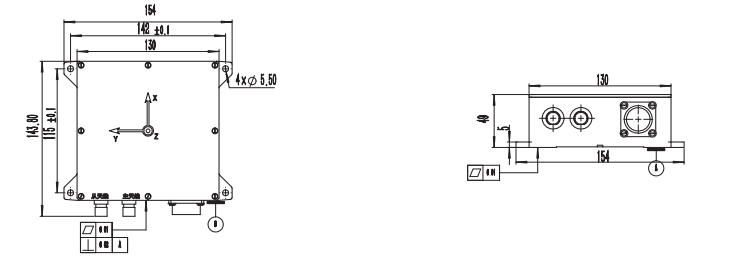
Dimension | mm | 143.8*154*49 | |||||
Weight | g | 100 | |||||
Interface | ______ | 2-ch RS-422 / RS-232 (navigation output) 1-ch RS-232 (differential output) 1-ch PPS output 1-ch CAN input | |||||
Dimension & Drawing