
HTS-INS-11 Inertial Navigation System (INS) consists of a MEMS inertial measurement unit to receive data such as the main inertial navigation, satellite navigation, and frame angle. It can be installed inside the pod and move with the frame, supporting the transfer alignment start-up method when the pod is in continuous rotation. The relative installation relationship between the main inertial navigation and the pod frame zero position can be compensated online. After switching to navigation mode, the output automatically calibrates the relative relationship between the MEMS inertial navigation and the frame angle, realizes the decoupling of the pod frame, and outputs the attitude information of the internal and external bases of the frame as required.
The HTS-INS-11 integrates Global Navigation Satellite System (GNSS) data for improved accuracy and combines it with inertial measurements for superior performance in dynamic environments. The INS (Inertial Navigation System) is equipped with a dual-band full-constellation GNSS receiver and supports inputs from external sensors such as DVL, odometer and air data sensors to enhance orientation and positioning capabilities in GNSS-constrained environments. It supports Real-Time Kinematic (RTK) and post-processing techniques to provide centimeter-level accuracy for applications that require precise navigation solutions.
Features:
• High-precision inertial navigation system
• Stable positioning during GNSS outages
• Low noise MEMS Gyroscopes
• High performance MEMS accelerometers
Performance Characteristics
|
Speci |
Unit |
Model |
||
|
HTS-INS-11 |
||||
|
Heading accuracy (uniform magnetic field, RMS) |
Heading angle |
° |
0.1 |
|
|
Pitch angle / Roll angle |
° |
0.05 |
||
|
Position accuracy (RMS) |
Level |
_____ |
m |
1.5 |
|
Height |
_____ |
m |
3 |
|
|
Speed accuracy (RMS) |
m/s |
0.2 |
||
|
Gyro |
Range |
°/s |
±400 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
1 |
||
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
°/h |
5 |
||
|
Bias repeatability |
°/h |
0.5 |
||
|
Resolution |
°/h |
1 |
||
|
Output noise (peak to peak) |
°/s |
0.2 |
||
|
Random walk |
°/√h |
0.03 |
||
|
Cross coupling |
% |
0.1 |
||
|
Bandwidth |
Hz |
400 |
||
|
Update frequency |
Hz |
4000 |
||
|
Accelerometer |
Range |
g |
±10 |
|
|
Bias stability (10s smooth, RMS, room temperature) |
mg |
0.05 |
||
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
mg |
2 |
||
|
Bias repeatability |
mg |
0.2 |
||
|
Cross coupling |
% |
0.1 |
||
|
Data update rate |
Hz |
200 (navigation data output) / 4000 (gyro data output) |
||
|
Votage |
V |
5±0.5 |
||
|
Power consumption |
W |
2 |
||
|
Operating temperature |
℃ |
-45~+80 |
||
|
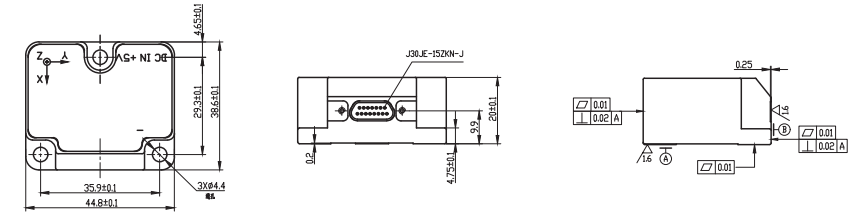
Dimension |
mm |
44.8*38.6*20 |
||
|
Weight |
g |
55 |
||
|
Interface |
______ |
1-ch RS-422 (navigation data output) 1-ch RS-422 (high frequency gyro output) 1-ch RS-422 (transfer alignment input) 1-ch PPS input |
||
Dimension & Drawing