
HTS-INS-4N Inertial Navigation System consists of a MEMS inertial measurement unit, a magnetometer, a barometer, a satellite positioning receiver, etc. It uses a completely independent lastest INS/GNSS combined navigation algorithm, MEMS device temperature error compensation technology, and system-level self-calibration and error compensation technology to achieve accurate measurement of speed, position, attitude, and angular rate information. It is a China-made alternative of SBG Ellipse-N series products. The HTS-INS-4N integrates Global Navigation Satellite System (GNSS) data for improved accuracy and combines it with inertial measurements for superior performance in dynamic environments. The INS (Inertial Navigation System) is equipped with a dual-band full-constellation GNSS receiver and supports inputs from external sensors such as DVL, odometer and air data sensors to enhance orientation and positioning capabilities in GNSS-constrained environments. It supports Real-Time Kinematic (RTK) and post-processing techniques to provide centimeter-level accuracy for applications that require precise navigation solutions.
The sensor fusion algorithms in the HTS-INS-4N Inertial Navigation System have been upgraded to cutting-edge versions, providing enhanced reliability, robustness and stability in terms of orientation, position, velocity and heave.
The HTS-INS4N (High-precision inertial navigation system) is equipped with ultra-low noise gyroscopes, low latency and high vibration resistance to provide precise orientation and position data. The HTS-INS-4N Inertial Navigation System has a built-in three-axis magnetometer with advanced calibration, making it highly resistant to transient magnetic interference and providing reliable backup when GNSS signals are unavailable.
Features:
• Built-in magnetometer for GNSS signal-restricted areas
• High-precision inertial navigation system
• Easy-to-use post-processing software
• Stable positioning during GNSS outages
Performance Characteristics
|
Speci |
Unit |
Model |
||
|
HTS-INS-4N |
||||
|
Heading accuracy (uniform magnetic field, RMS) |
Heading angle |
Airborne, Shipborne |
° |
0.5 |
|
In-car |
° |
0.2 |
||
|
Uniform magnetic field, attitude mode |
° |
1.0 |
||
|
Pitch angle / Roll angle |
Airborne, Shipborne |
° |
0.2 |
|
|
In-car |
° |
0.15 |
||
|
Position accuracy (RMS) |
Level |
_____ |
m |
1.5 (RTK:0.8cm+1ppm) |
|
Height |
_____ |
m |
3(RTK:1.5cm+1ppm) |
|
|
Speed accuracy (RMS) |
m/s |
0.2 |
||
|
Gyro |
Range |
°/s |
±500 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
10 |
||
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
°/h |
60 |
||
|
Bias repeatability |
°/h |
20 |
||
|
Random walk |
°/√h |
0.5 |
||
|
Cross coupling |
% |
0.2 |
||
|
Accelerometer |
Range |
g |
±10 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.05 |
||
|
Full temperature zero bias change (10s smoothing, RMS, variable temperature) |
mg |
2 |
||
|
Bias repeatability |
mg |
0.2 |
||
|
Cross coupling |
% |
0.1 |
||
|
Magnetometer |
Range |
guass |
±2.5 |
|
|
Sensitivity |
mguass/LSB |
0.1 |
||
|
Barometer |
Pressure range |
mbar |
300~1100 |
|
|
Relative error |
mbar |
2.5 |
||
|
Satellite positioning |
Frequency |
______ |
BDS: B1IB2IB3IB1C B2a GPS:LIC/A LIC L2P(W) L2CL5 GLONASS:L1L2 Galileo:E1 E5a E5b QZSS: L1 L2 L5 |
|
|
Cold start |
|
20 |
||
|
Data update rate |
Hz |
100 (customizable) |
||
|
Votage |
V |
5~30 |
||
|
Power consumption |
W |
1.0 |
||
|
Operating temperature |
℃ |
-45~+80 |
||
|
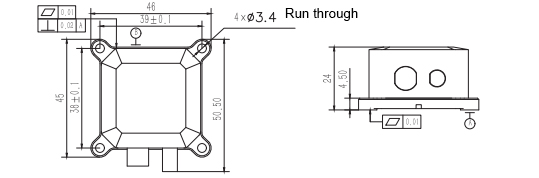
Dimension |
mm |
45*46*24 |
||
|
Weight |
g |
55 |
||
|
Interface |
______ |
1-ch RS-422/RS-232 (navigation output) 1-ch RS-232 (differential input) 1-ch PPS output |
||
Dimension & Drawing