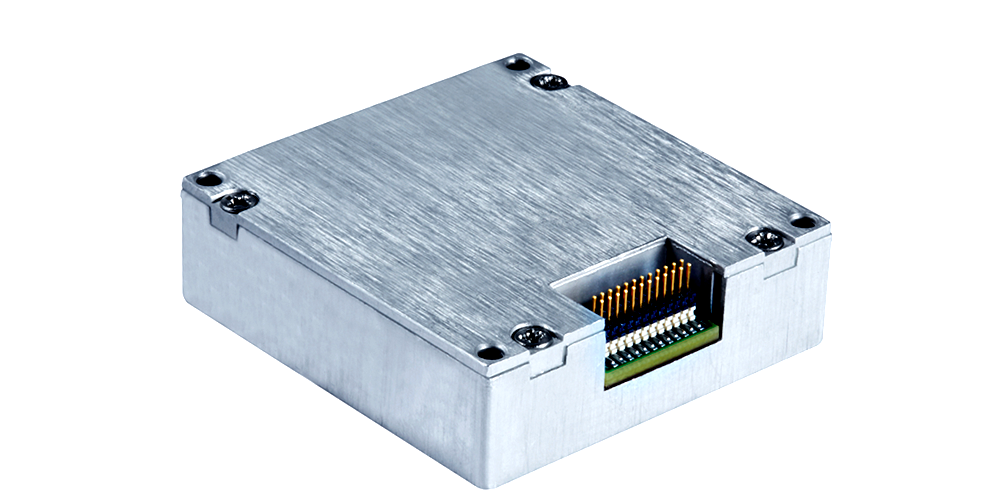
HTS-IMU-LP2 Inertial Measurement Unit is a small, tactical grade, ten degrees of freedom inertial measurement unit based on MEMS technology, which includes a triaxis gyroscope, a triaxis accelerometer, triaxis magntometer, and pressure senor. This IMU uses flexible connection technology, built-in full temperature compensation, installation misalignment angle compensation, nonlinear compensation and other compensation algorithms, and can output stable and reliable measurement data for users after error compensation under static, dynamic and harsh conditions.
The HTS-IMU-LP2 inertial measurement unit adopts the advanced domestic MEMS components, it can effectively reduce the cost. The HTS-IMU-LP2 features with high stability, compact size and light weight. The HTS-IMU-LP2 inertial measurement unit is packaged in a module that is approximately 44 mm × 47 mm × 14 mm and includes a standard connector interface.
Features:
Triaxial, digital gyroscope, ±450°/sec dynamic range
±0.05° orthogonal alignment error, 4.0°/hr in-run bias stability, 0.26°/√hr angular random walk, 0.01% nonlinearity
Triaxial, digital accelerometer, ±18 g
Triaxial, delta angle and delta velocity outputs
Triaxial, digital magnetometer, ±2.5 gauss
Digital pressure sensor, 300 mbar to 1100 mbar
Factory-calibrated sensitivity, bias, and axial alignment
Operating and calibration temperature range: −45°C to +85°C
SPI-compatible serial interface
Programmable operation and control
4 FIR filter banks, 120 configurable taps
Digital input/output: data-ready alarm indicator, optional external sample clock up to 2.4 kHz
Alarms for condition monitoring
Single-supply operation: 3.0 V to 3.6 V
10000 g shock survivability
Performance Characteristics
TC = 25°C, VDD = 3.3 V, angular rate = 0°/sec, dynamic range = ±450°/sec , ± 1 g, 300 mbar to 1100 mbar, unless otherwise noted.
|
Speci |
Unit |
Model |
|
|
HTS-IMU-LP2 |
|||
|
Gyro |
Range (customizable) |
°/s |
±480 |
|
Bias instability (@Allan error) |
°/h |
5 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
°/h |
10 |
|
|
Bias repeatability |
°/h |
20 |
|
|
Bias error within full temperature range |
°/h |
72 |
|
|
Random walk |
°/√h |
0.26 |
|
|
Bias acceleration sensitivity |
°/h/g |
20 |
|
|
Resolution |
°/s |
0.01 |
|
|
Output noise(half peak) |
°/s |
0.4 |
|
|
Bandwidth |
Hz |
330 |
|
|
Scale factor non-linearity |
ppm |
200 |
|
|
Scale factor repeatability |
ppm |
200 |
|
|
Cross coupling |
% |
0.2 |
|
|
Accelerometer |
Range (customizable) |
g |
±20 |
|
Bias instability (@Allan error) |
mg |
0.07 |
|
|
Bias stability (10s smooth, 1σ, room temperature) |
mg |
0.25 |
|
|
Bias repeatability |
mg |
0.5 |
|
|
Bias error within full temperature |
mg |
3 |
|
|
Random walk |
m/s/√h |
0.029 |
|
|
Resolution |
mg |
0.1 |
|
|
Bandwidth |
Hz |
250 |
|
|
Scale factor non-linearity |
ppm |
500 |
|
|
Scale factor repeatability |
ppm |
500 |
|
|
Cross coupling |
% |
0.2 |
|
|
Magnetometer |
Range |
guass |
±2.5 |
|
Sensitivity |
Mguass/LSB |
0.1 |
|
|
Pressure sensor |
Pressure range |
Mbar |
300~1100 |
|
Sensitivity |
mbar/LSB |
6.1×10-7 |
|
|
Others |
Stable start time |
s |
1 |
|
Data update rate |
Hz |
2460 |
|
|
Voltage |
V |
3.3±0.15 |
|
|
Steady state power consumption |
W |
0.5 |
|
|
Ripple |
mV |
100 |
|
|
Working temperature |
℃ |
-45~85 |
|
|
Storage temperature |
℃ |
-55~85 |
|
|
Weight |
g |
48±2 |
|
|
Size |
mm |
44×47×14 |
|
|
Interface |
—— |
SPI |
|
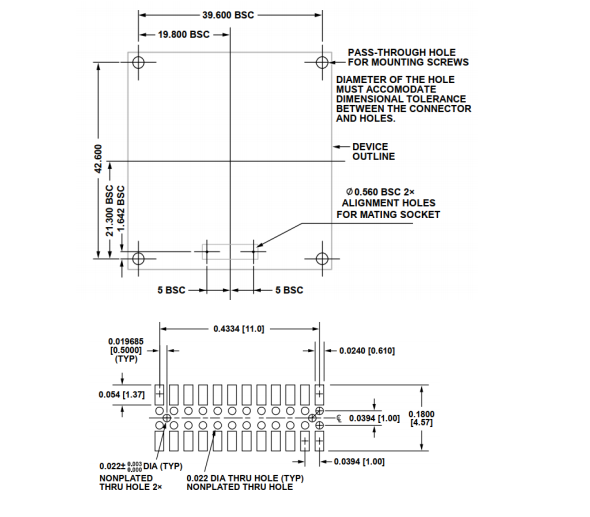
Dimension & Drawing